Vous allez apprendre à configurer un projet dans le logiciel EV3, puis réaliserez quelques tests sur vos capteurs avant de créer votre premier programme dans le chapitre suivant: le très classique suiveur de lignes.
N'oubliez pas de prendre des notes au fur et à mesure de vos avancées.
Configuration du projet
-
Lancer le logiciel EV3. Cliquer sur l'onglet + en haut à gauche pour démarrer un nouveau projet.

-
Connecter le robot sur un port USB à l'aide d'un câble approprié. Démarrer le robot pour qu'il soit détecté par le logiciel
-
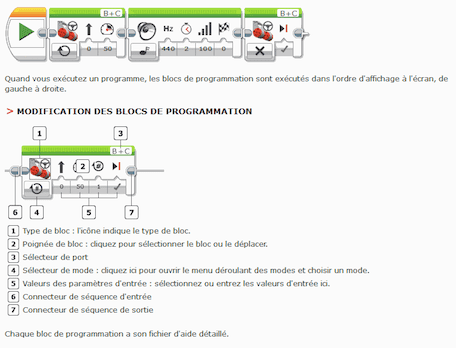
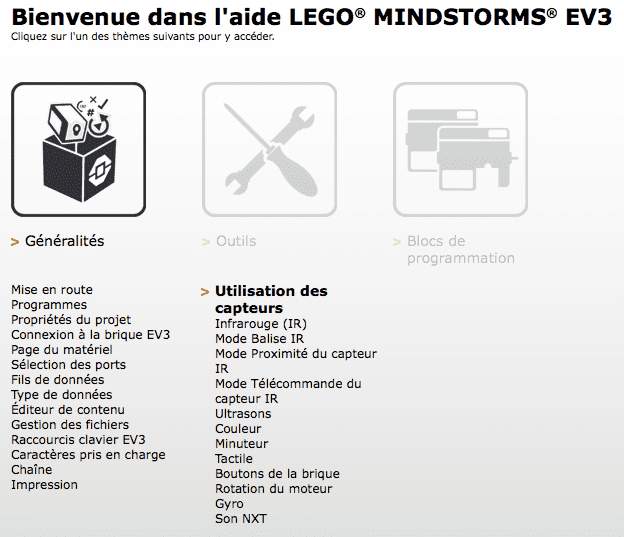
Ouvrir l'aide EV3 et suivre le tutoriel sur les généralités.
-
Sur la "Page du Matériel" : lire attentivement les explications pour renseigner les ports sur lesquels vous avez branchés les 2 moteurs (B et C), le gros moteur central (A), le capteur de contact (port 1 ou 2) et le capteur de couleur (port3)
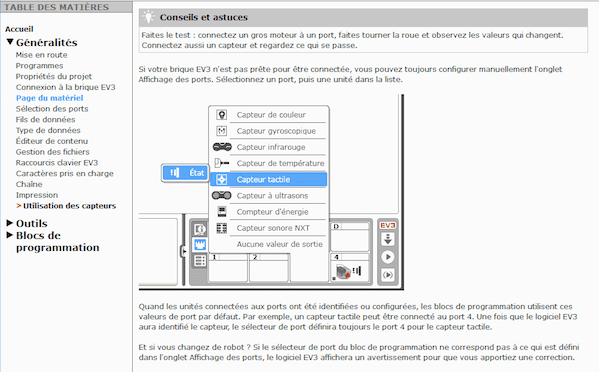
Configurez le projet dans la fenêtre matériel avec ces renseignements
Réalisation des tests
-
Réalisez alors des tests sur votre robot et lire les valeurs affichées pour le capteur de contact, lorsqu'il est :
-
enfoncé
-
relâché
-
Réalisez les tests sur votre robot et lire les valeurs affichées pour le capteur de couleur lorsque l'on dispose sous le capteur un objet de couleur
-
bleu
-
vert
-
rouge
-
jaune
-
Réalisez les tests sur ce même capteur de couleur, mais en mode "mesure d'intensité ambiante". Noter la valeur lorsque l'on dispose devant le capteur un objet :
-
Blanc
-
Noir
-
Refaire le même test, mais cette fois ci en mode "mesure d'intensité réfléchie" (le capteur émettant de la lumière rouge)
-
Consignez tous vos résultats par écrit dans votre cahier : capteurs, ports, conditions d'essais, résultats
-
Sur la page de l'aide : Programmes : Familiarisez vous avec la programmation par "briques"